
gazebo中添加动态障碍物
创始人
2024-03-21 20:49:17
文章目录
- gazebo 教程
- gazebo 添加动态障碍物
- gazebo添加动态障碍物插件
- gazebo中动态障碍物实时pose
gazebo 教程
- gazebo github
https://github.com/gazebosim/gazebo-classic/tree/gazebo9 - gazebo tutorials
https://classic.gazebosim.org/tutorials - 运行一个空白环境
0.4 0.4 0.4 1 0.7 0.7 0.7 1 true model://sun model://ground_plane gazebo 添加动态障碍物
参照官方教程:
https://classic.gazebosim.org/tutorials?tut=actor&cat=build_robot

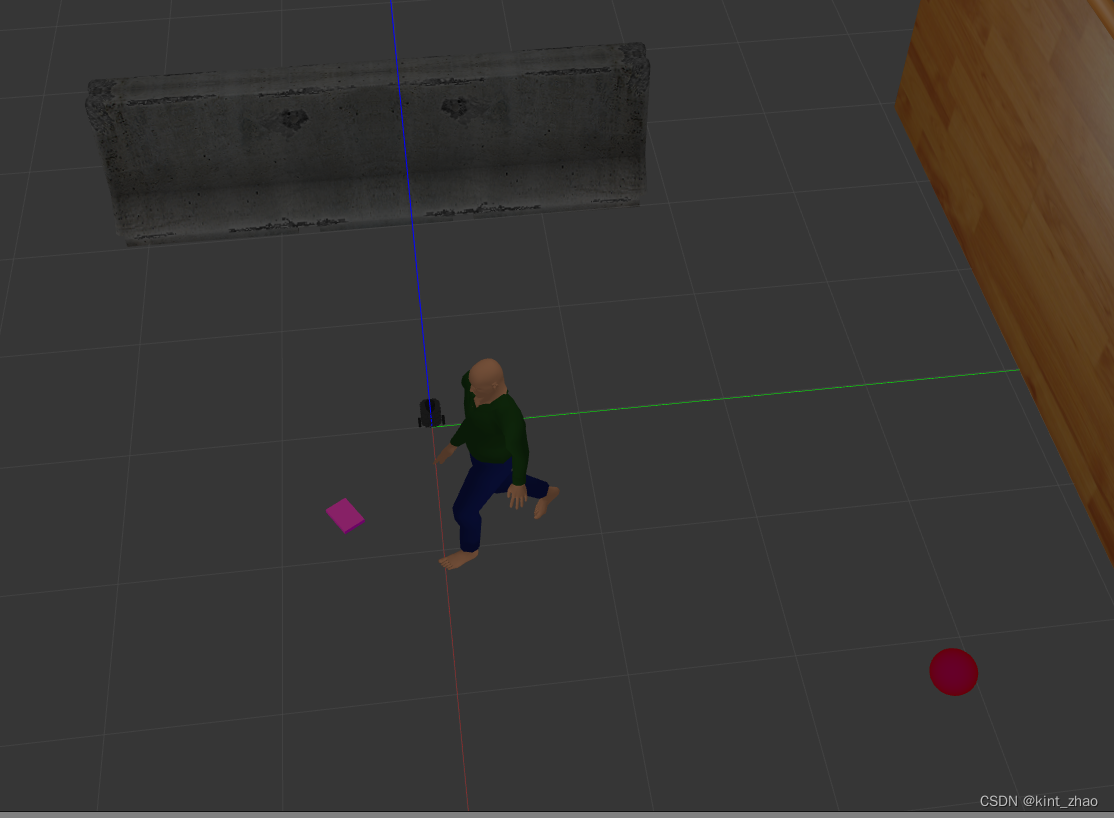
actor标签范围内的模型配置。人会在多点间运动
model://sun walk.dae walk.dae 问题: 这个人或其它模型的配置是透明的,激光无法监测到对应的物体
gazebo添加动态障碍物插件
参照: https://zhuanlan.zhihu.com/p/404197579
https://blog.csdn.net/allenhsu6/article/details/114068662
默认gazebo9 的插件路径: /usr/lib/x86_64-linux-gnu/gazebo-9/plugins
kint@kint:~$ ls /usr/lib/x86_64-linux-gnu/gazebo-9/plugins
libActorPlugin.so libCameraPlugin.so libFiducialCameraPlugin.so libHydraPlugin.so libLinearBatteryConsumerPlugin.so libRandomVelocityPlugin.so libSkidSteerDrivePlugin.so
libActuatorPlugin.so libCartDemoPlugin.so libFollowerPlugin.so libImuSensorPlugin.so libLinearBatteryPlugin.so libRayPlugin.so libSonarPlugin.so
libArduCopterPlugin.so libCessnaGUIPlugin.so libForceTorquePlugin.so libInitialVelocityPlugin.so libLinkPlot3DPlugin.so libRaySensorNoisePlugin.so libSphereAtlasDemoPlugin.so
libArrangePlugin.so libCessnaPlugin.so libGimbalSmall2dPlugin.so libJointTrajectoryPlugin.so libLookAtDemoPlugin.so libRegionEventBoxPlugin.so libTimerGUIPlugin.so
libAttachLightPlugin.so libContactPlugin.so libGpuRayPlugin.so libKeyboardGUIPlugin.so libModelPropShop.so libRestUiPlugin.so libTouchPlugin.so
libBlinkVisualPlugin.so libDepthCameraPlugin.so libHarnessPlugin.so libKeysToJointsPlugin.so libMudPlugin.so libRestWebPlugin.so libTransporterPlugin.so
libBreakableJointPlugin.so libDiffDrivePlugin.so libHeightmapLODPlugin.so libLensFlareSensorPlugin.so libPlaneDemoPlugin.so libRubblePlugin.so libVehiclePlugin.so
libBuoyancyPlugin.so libElevatorPlugin.so libHydraDemoPlugin.so libLiftDragPlugin.so libPressurePlugin.so libSimEventsPlugin.so libWindPlugin.sokint@kint:~$ ls /usr/lib/x86_64-linux-gnu/gazebo-9/plugins | grep libActorCollisionsPlugin编译并拷贝好对应插件后
kint@kint:~$ ls /usr/lib/x86_64-linux-gnu/gazebo-9/plugins | grep libActorCollisionsPlugin
libActorCollisionsPlugin.so参考自己下载源码去编译,注意gazebo的版本和branch对应
附:在gazebo中添加碰撞插件1.下载gazebo源码git clone https://github.com/gazebosim/gazebo-classic
注意branch: gazebo92.进入actor_collisions文件夹cd examples/plugins/actor_collisions
3.编译碰撞插件mkdir build
cd build
cmake ..
make
4.插件拷贝sudo cp libActorCollisionsPlugin.so /usr/lib/x86_64-linux-gnu/gazebo-9/plugins
5.测试插件gazebo actor_collisions.world
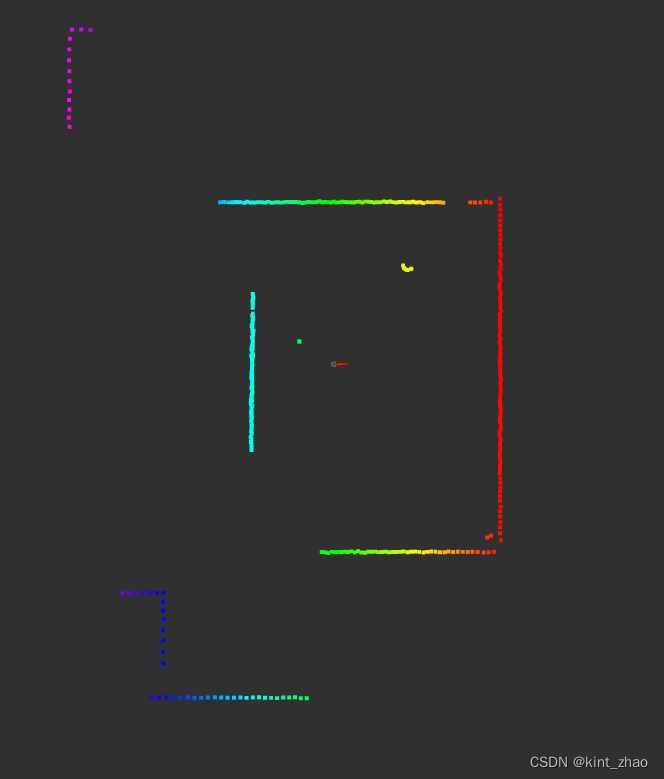
actor_collisions.world 中的动态物体代码部分如下,如要在原静态world中添加,直接将actor标签整过去就行,修改相应的运行轨迹waypoint:
walk.dae 1.0 walk.dae 1.000000 true 激光可视效果图:
gazebo中动态障碍物实时pose
- gazebo_ros_p3d 无法发布world中model的pose
运动中机器人是可以通过这以odometer的形式发布话题
https://github.com/ros-simulation/gazebo_ros_pkgs/blob/noetic-devel/gazebo_plugins/src/gazebo_ros_p3d.cpp
true 50.0 base_link robot_pose 0.01 world 0 0 0 0 0 0 动态模型使用gazebo_ros_p3d插件发布pose待研究
无效的
- gazebo提供相应的服务与话题接口可以查看model的pose信息
int@kint:~$ rostopic list | grep state
/gazebo/link_states
/gazebo/model_stateskint@kint:~$ rosservice list | grep state
/gazebo/get_link_state
/gazebo/get_model_state
kint@kint:~$ rostopic echo /gazebo/model_states
name: - ground_plane- Untitled- cube_20k- Dumpster- Dumpster_0- jersey_barrier- actor- turtlebot3_burger
pose: - position: x: 0.0y: 0.0z: 0.0orientation: x: 0.0y: 0.0z: 0.0w: 1.0- position: x: 0.603431y: 0.0078z: 0.0orientation: x: 0.0y: 0.0z: 0.0w: 1.0- position: x: -5.38602065236y: -6.80744881043z: 0.499999533763orientation: x: -1.56147498596e-07y: 4.11218458777e-07z: 0.000350767461665w: 0.999999938481- position: x: 5.96634000329y: -7.4192400014z: 0.000917228865924orientation: x: -4.4374537364e-08y: 8.20482662792e-07z: -3.21807825887e-11w: 1.0- position: x: 6.01622000329y: 6.8208899986z: 0.000917228865924orientation: x: -4.4374537364e-08y: 8.20482662792e-07z: -3.21807825887e-11w: 1.0- position: x: -2.42989y: -0.195854z: 0.0orientation: x: 0.0y: 0.0z: 0.703329181425w: 0.710864306711- position: x: -0.762738254539y: -0.685481094471z: 1.032665orientation: x: -0.224475849993y: 0.65300445035z: 0.665474749341w: -0.283441596422- position: x: -0.0451317038465y: 0.0244496431331z: -0.00100340529416orientation: x: -0.00228018314614y: 0.00312514199549z: 0.588102512665w: 0.808777144119
twist: - linear: x: 0.0y: 0.0z: 0.0angular: x: 0.0y: 0.0z: 0.0- linear: x: 0.0y: 0.0z: 0.0angular: x: 0.0y: 0.0z: 0.0- linear: x: 0.0y: 0.0z: 0.0angular: x: 0.0y: 0.0z: 0.0- linear: x: 0.0y: 0.0z: 0.0angular: x: 0.0y: 0.0z: 0.0- linear: x: 0.0y: 0.0z: 0.0angular: x: 0.0y: 0.0z: 0.0- linear: x: 0.0y: 0.0z: 0.0angular: x: 0.0y: 0.0z: 0.0- linear: x: 0.0y: 0.0z: 0.0angular: x: 0.0y: 0.0z: 0.0- linear: x: -0.00109069429249y: 0.000179601510918z: 1.84796141906e-05angular: x: 7.65645076952e-05y: -1.82519279997e-05z: 0.0165613168548kint@kint:~$ rosservice call /gazebo/get_model_state "model_name: 'actor'
relative_entity_name: ''"
header: seq: 1stamp: secs: 628nsecs: 363000000frame_id: ''
pose: position: x: -0.734865579665y: 0.655232085776z: 1.030874orientation: x: 0.261328317576y: 0.654221918987z: 0.66146012535w: 0.257238592986
twist: linear: x: 0.0y: 0.0z: 0.0angular: x: 0.0y: 0.0z: 0.0
success: True
status_message: "GetModelState: got properties"- 常见一个ros节点程序,订阅gazebo模型发布的pose, 再将目标模型的pose以odometer方式发布
相关内容
热门资讯
原创 美...
二、美国议员团访华:外交与军事压力的双重交锋 同一天,美国国会众议员代表团抵达中国,这次罕见的访问标...
云谷板块封神之作!绿城观紫金宸...
绿城观紫金宸庐 | 西湖区云谷芯低密叠墅 稀缺资产与品质生活的双重答案 📍📍绿城观紫金宸庐售楼处官方...
最新或2023(历届)浙江高考...
各市、县(市、区)教育考试院(考试中心、招生办公室):现将《最新或2023(历届)浙江省普通高校招生...
最新或2023(历届)浙江高考...
2月1日,最新或2023(历届)浙江高考网上报名开始,2月28日报名截止。考生可登录报名。昨天,记者...