
AutoSAR-基于Matlab/Simulink的软件组件开发
AUTOSAR软件组件级设计与开发主要是针对应用层软件,需要先基于Matlab/Simulink进行应用层软件组件的模型建立,并配置生成符合AUTOSAR规范的代码及arxml描述文件,这是一种“自下而上”的工作流程。
基于Matlab/Simulink的软件组件开发主要就是对AUTOSAR软件组件内部行为的实现,即实现内部算法。
Matlab/Simulink与AutoSAR的对应关系
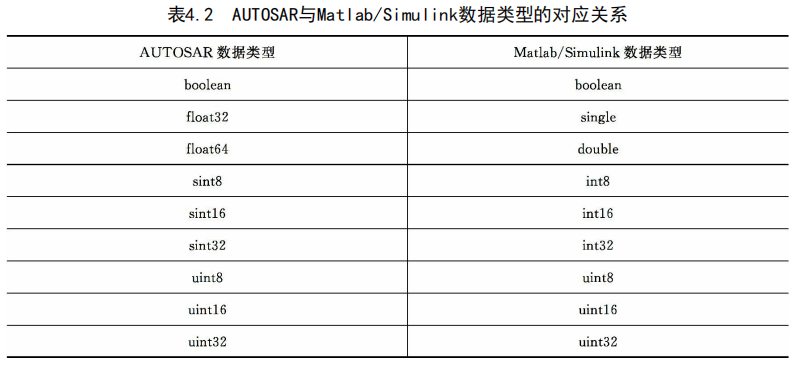
大家都知道Simulink是有自动生成代码(Embedded Coder)功能的,但是可不是生成的所有代码都可以用到AutoSar里面,而是我们在设计之处就应该按照一定的对应关系来设计AtuoSAR软件组件的各个组成元素:

实战
Simulink中利用Function Call Subsystem(函数调用子系统)来表征AUTOSAR软件组件的Runnable Entity(运行实体);
利用Function Call(函数调用)来表征AUTOSAR软件组件的RTE Event(RTE事件)利用这个思路咱们设计一个电灯的SWC——LightControlSWC。
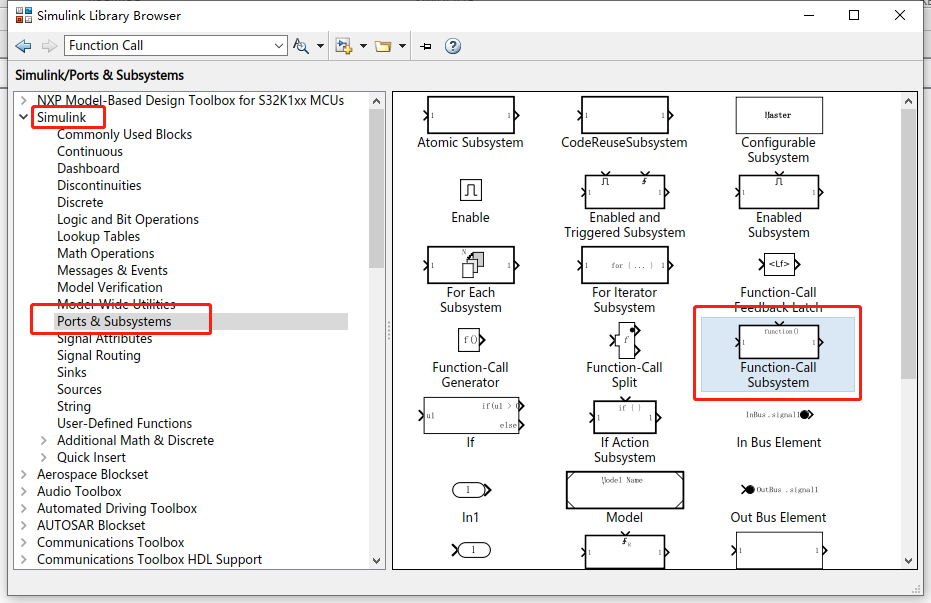
找到Function Call Subsystem模块
Simulink / Ports & Subsystems
根据功能需求进行内部建模
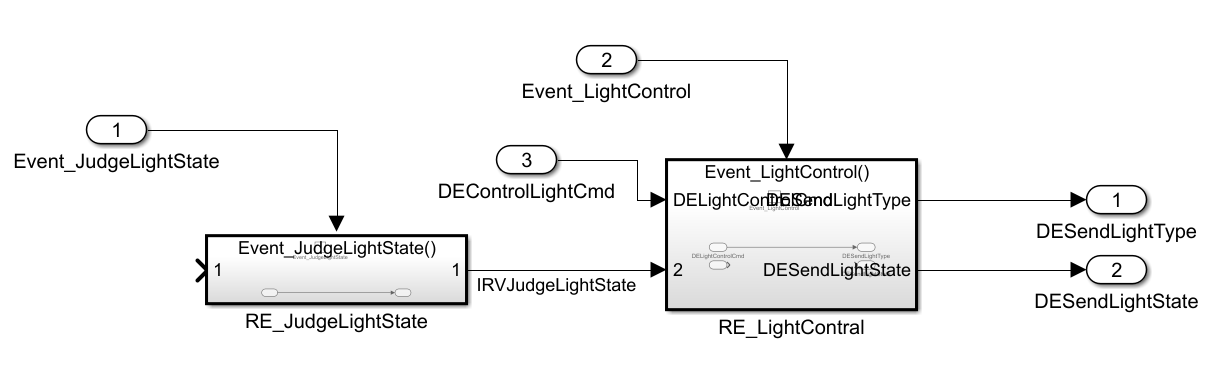
LightControlSWC软件组件主要有两个运行实体:

RE_JudgeLightState通过采集车灯实际硬件上的控制信号,即对于A型车灯通过ADC采集电压信号,对于B型车灯则通过ICU采集PWM占空比,对采样值进行处理判断后通过运行实体间变量IRVJudgeLightState将车灯状态传递给RE_LightControl。
RE_LightControl则负责将车灯状态与车灯类型通过端口发出,并且将车灯实际控制量传递给I/O抽象软件组件。
接口端口设计:

模块搭建如下:
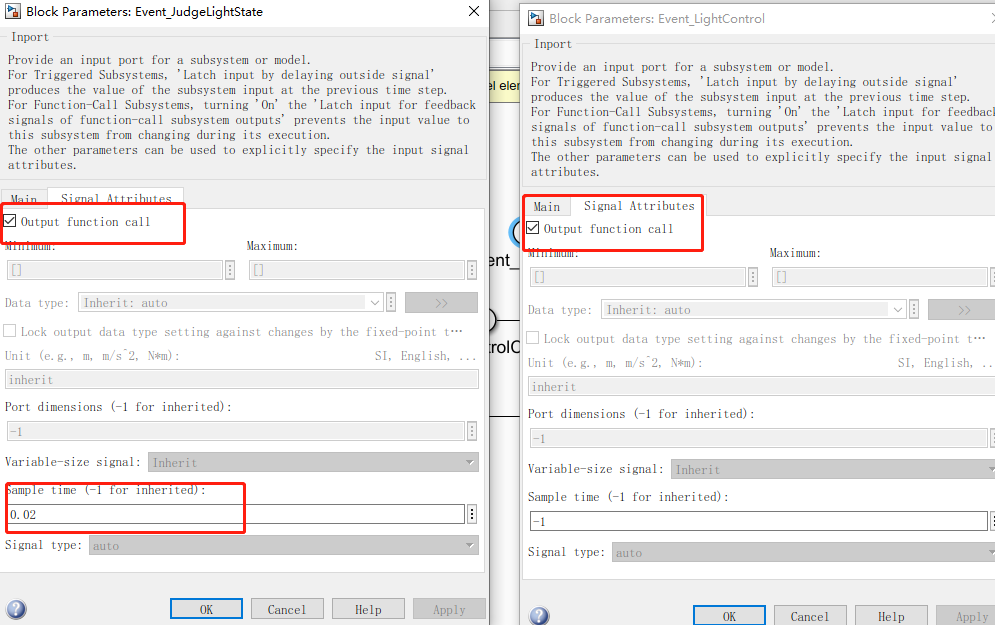
注意:
- Inport 1(Event_JudgeLightState)和Inport 2(Event_LightControl)作为RTE事件,所以需要勾选Output function call
- 对于周期性触发的RE_JudgeLightState,作 为RTE事件的Inport 1中的Sample time则对应该运行实体的调用周期
同理,可以开发出LightRequestSWC软件组件的Simulink模型:
功能需求如下:
LightRequestSWC软件组件对于A型和B型车灯控制器共有的主要任务是负责检测并判断车灯开关的状态:
- 对于B型车灯还负责接收并判断外界光强情况,并对外输出车灯控制指令,
- 对于A型车灯控制指令为0/1,即开与关;
- 对于B型车灯控制指令为PWM占空比值,分为0、50%、100%。
- 此外,当车灯开关关闭时间长于5分钟时,发出关闭LightECU CAN通信的指令,一旦检测到车灯开关打开,则再恢复控制器CAN通信


搭建模型:

AUTOSAR客户端/服务器机制的实现
客户端/服务器机制的本质是函数调用关系,客户端调用服务器的函数。
- C/S PPort(C/S供型端口),即Server端,对应Simulink Function(Simulink函数模块);
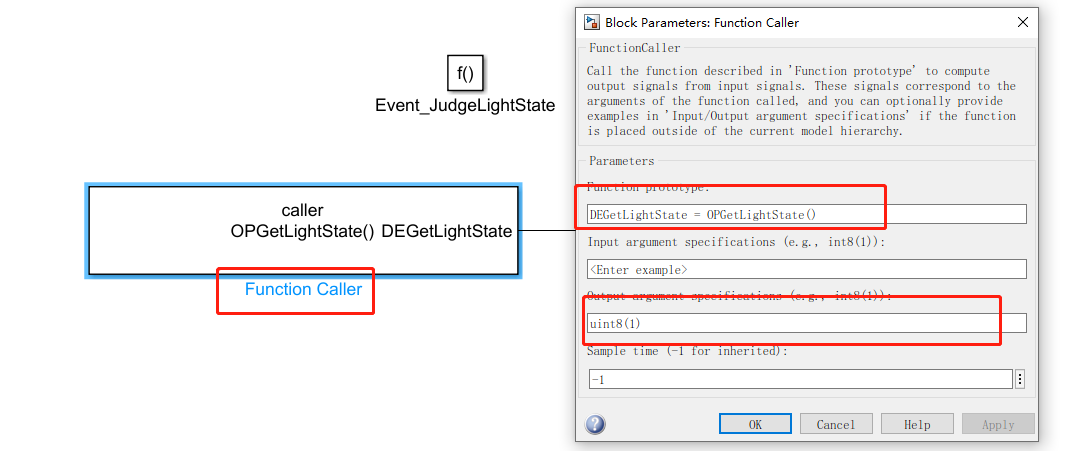
- C/S RPort(C/S需型端口),即Client端,对应Function Caller(函数调用模块)
举例,在前面的RE_JudgeLightState运行实体中的Client设计:
该端口需要调用IOAbstractionSWC软件组件中的函数,并从中读取灯的状态信息,对于A型车灯而言是读取A/D转换值,对于B型车灯而言是读取ICU捕获到的脉冲占空比值:
插入模块:Function Caller就是调用某个组件中的函数
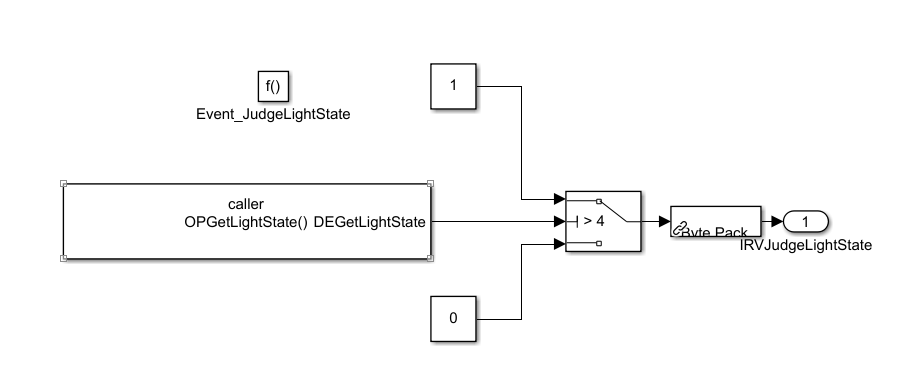
搭建模型:
生成代码与文件配置
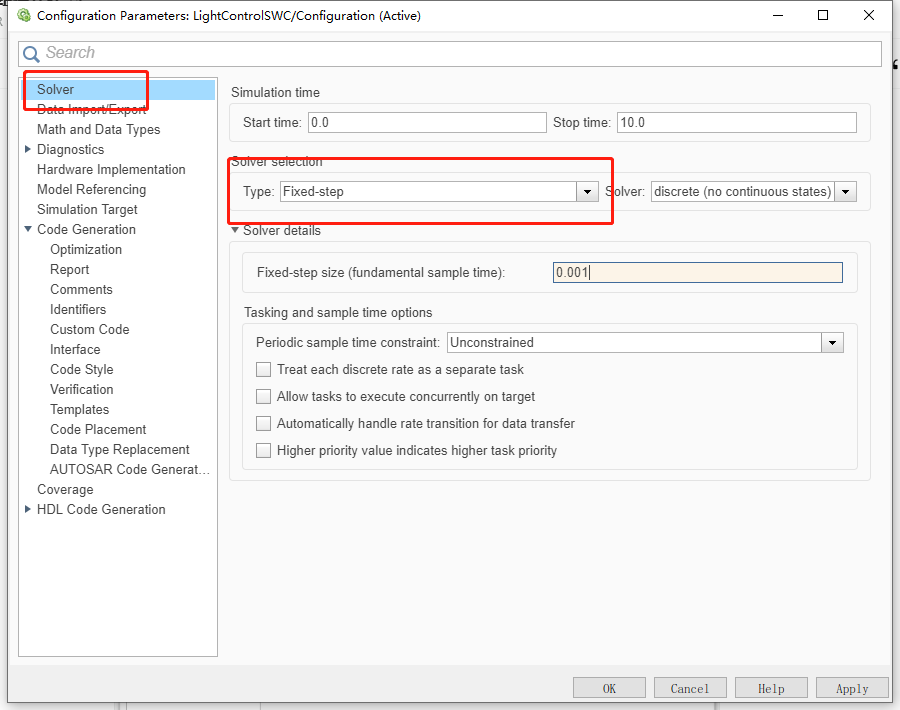
ctrl+e将进入配置界面:
第一步设置固定步长
第二步配置系统目标文件
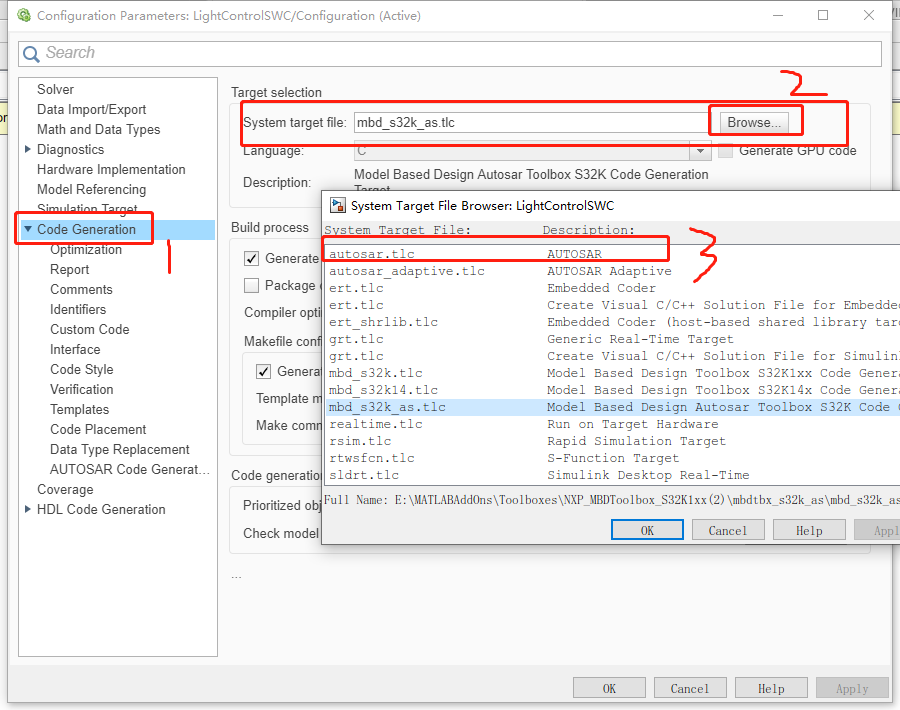
tlc是target language compiler(目标语言编辑器)的全称,其类似脚本语言,可以控制代码生成的格式。
再进入AUTOSAR Code Generation:
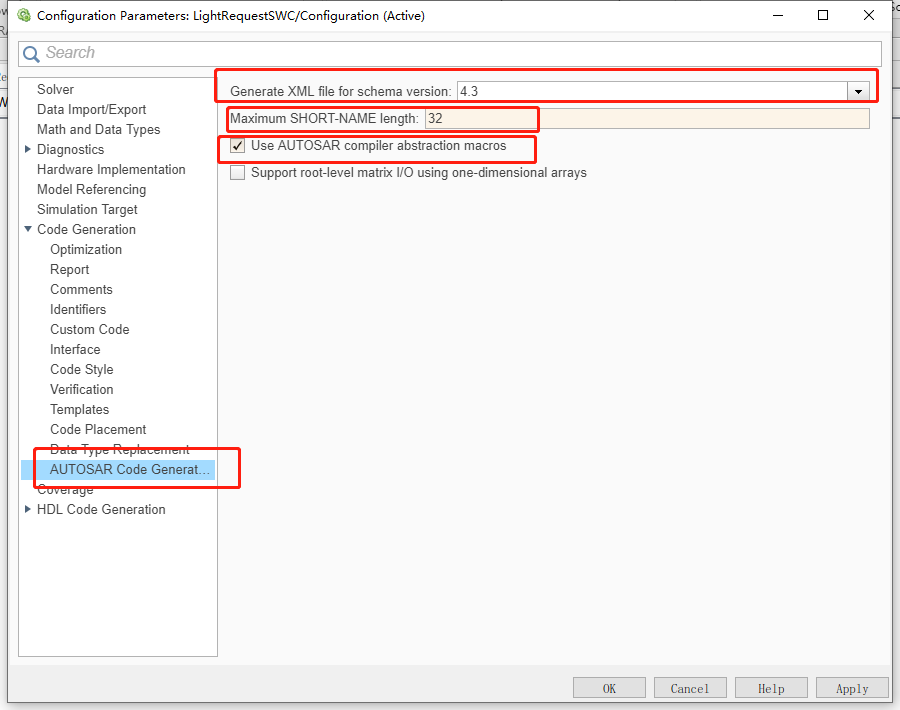
- Generate XML file for schema version选项中可以选择生成描述文件的AUTOSAR版本;
- Maxium SHORT-NAME length属性可以设置命名的最大长度,即之后在配置软件组件相关特性时自定义名字的最大长度。
- Use AUTOSAR compiler abstraction macros选项则是开启或者关闭AUTOSAR规范中所定义的一些宏,如FUNC等
再往下就和书里不太一样了,simulink升级比较快,很多操作都变了。
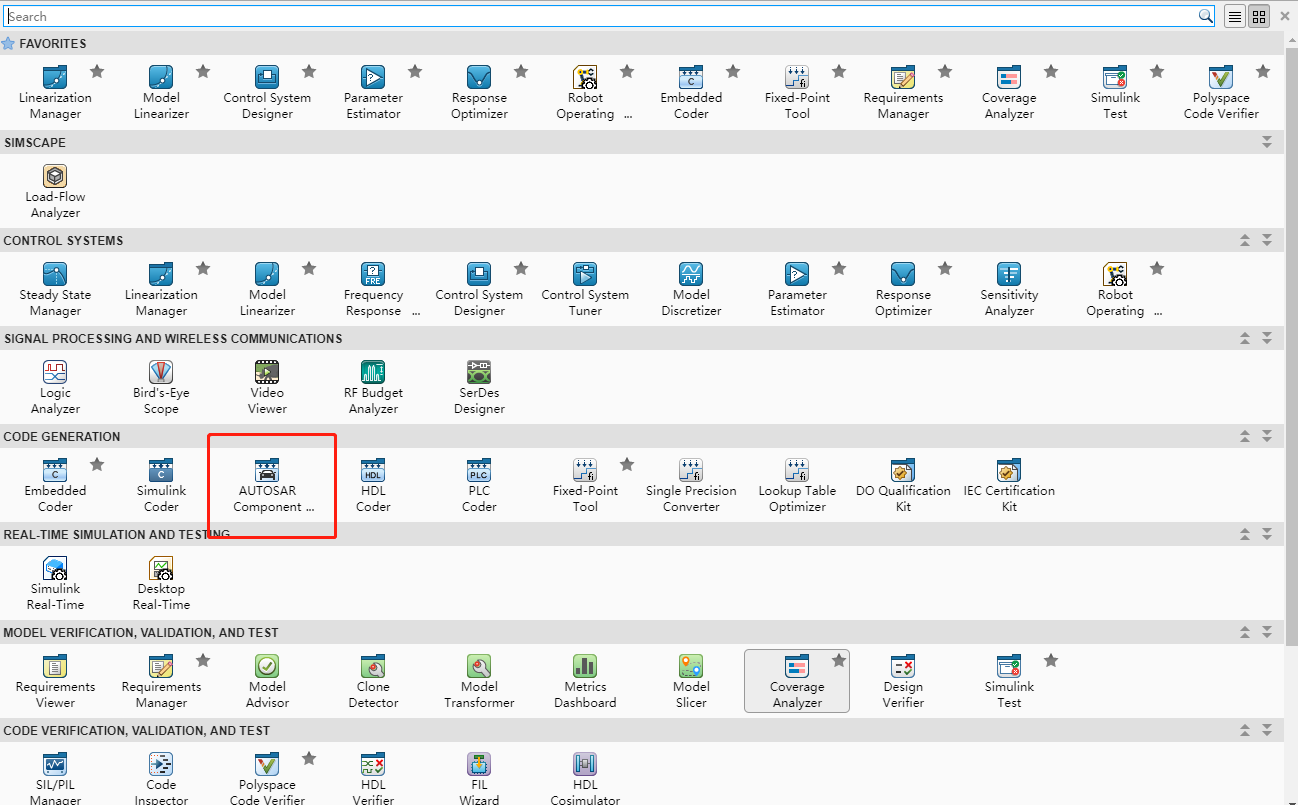
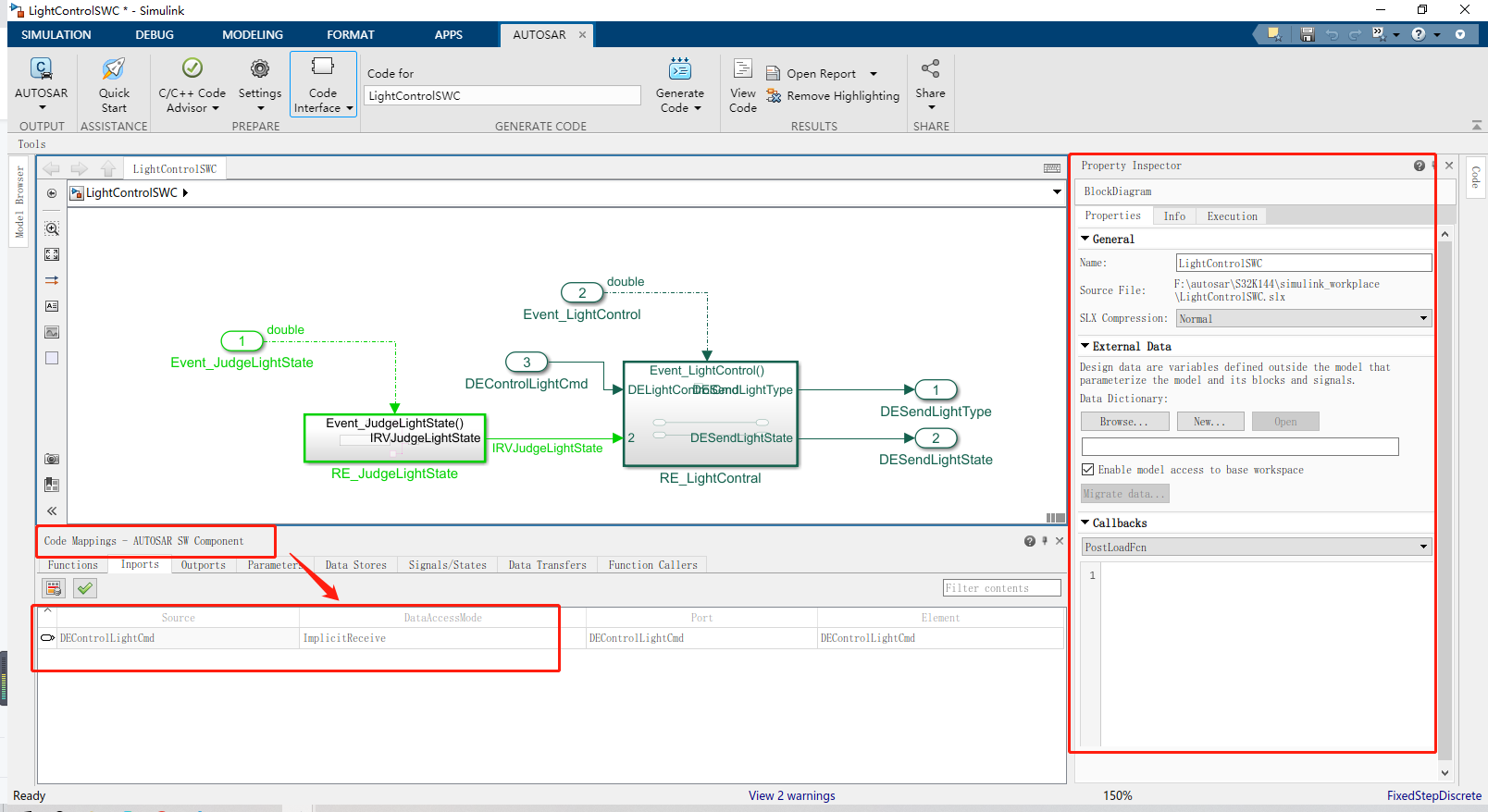
找到autosar配置窗口
一定要注意标出的这两个组件:
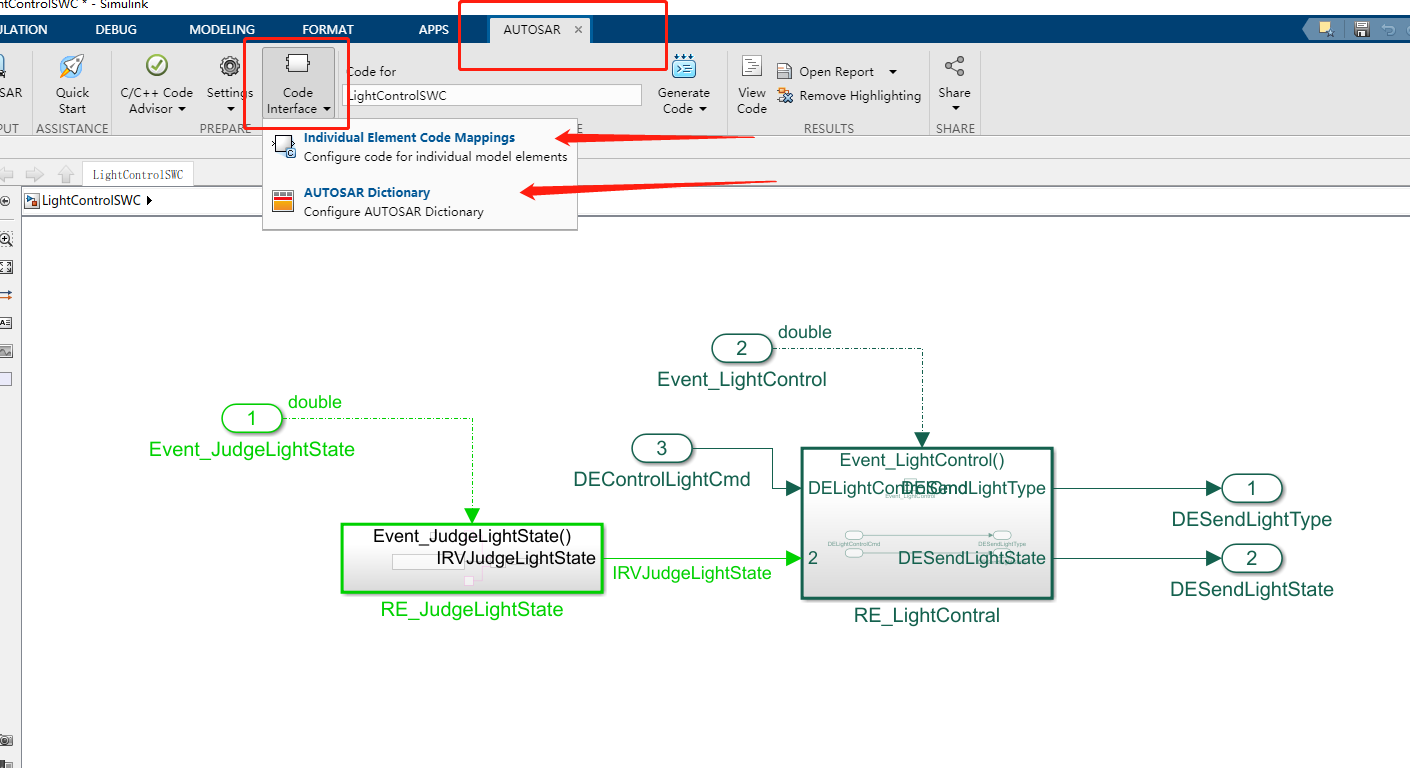
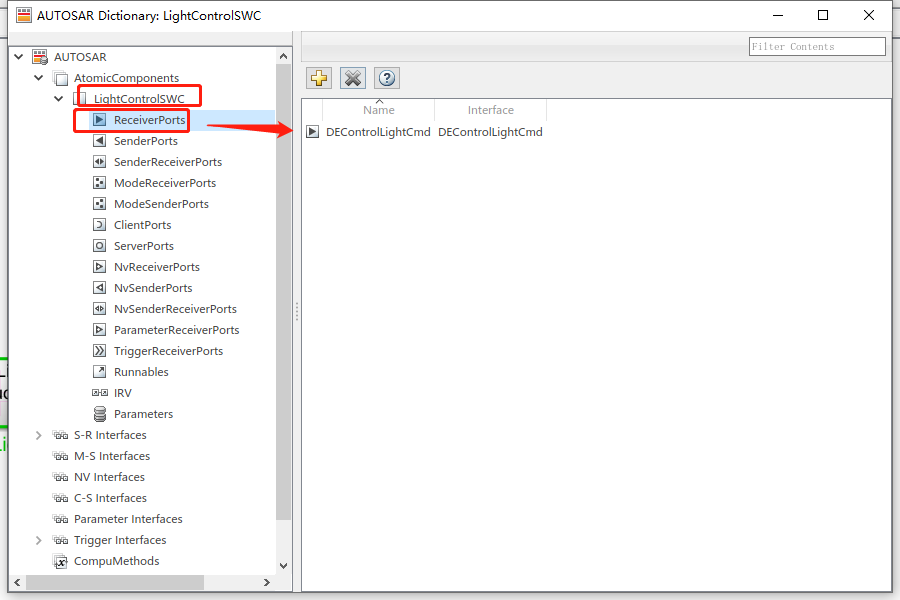
AUTOSAR Dictionary:
以树格式显示映射的 AUTOSAR 组件及其元素、通信接口、计算方法、软件寻址方法和 XML 选项,使用该字典可从 AUTOSAR 组件的角度配置 AUTOSAR 元素和属性。
Mapping:
主要可以将Simulink中所建模型的元素与AUTOSAR软件组件相关元素进行对应
配置流程
先在AUTOSAR Dictionary界面完成软件组件元素的定义与相关配置,再切换到Simulink-AUTOSAR Mapping界面完成AUTOSAR软件组件元素与Simulink元素的映射。
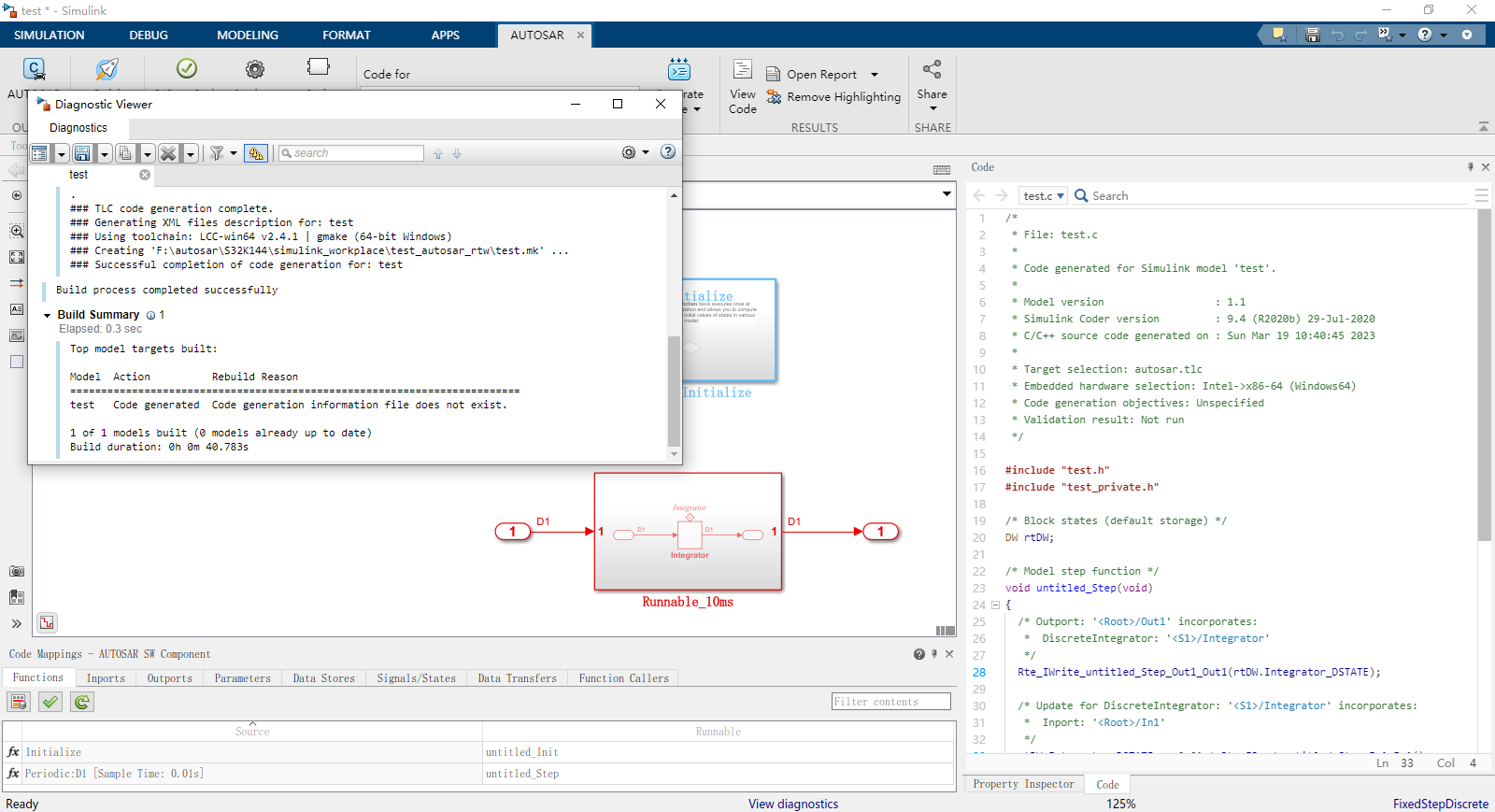
具体配置流程不再赘述,按照自己的要求配置完成后,点击代码生成:
就可以看到生成的代码模型:
生成的文件树,就在模型所在文件夹下:
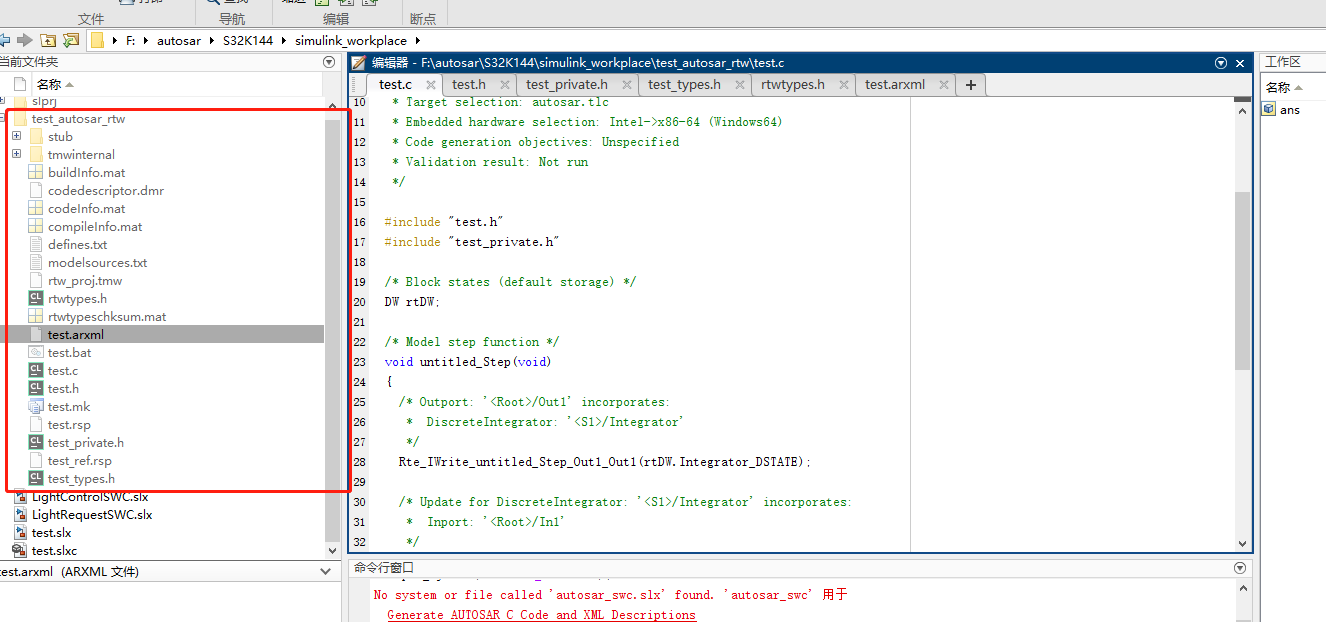
每个文件都有自己的作用:
.c:包含所有软件组件运行实体的模型算法实现 代码,每个运行实体分别对应一个函数;
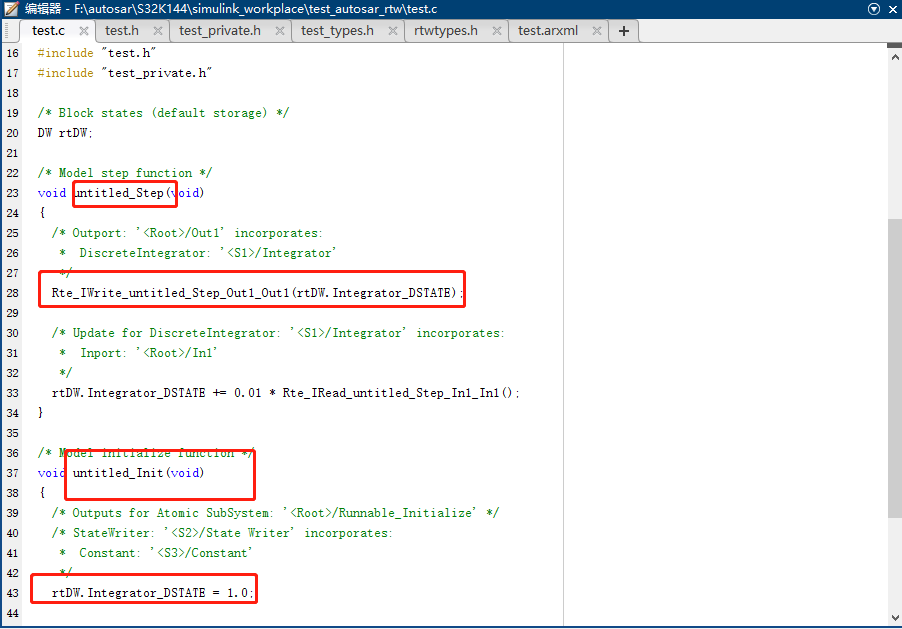
.h:包含系统的数据结构、函数外部声明
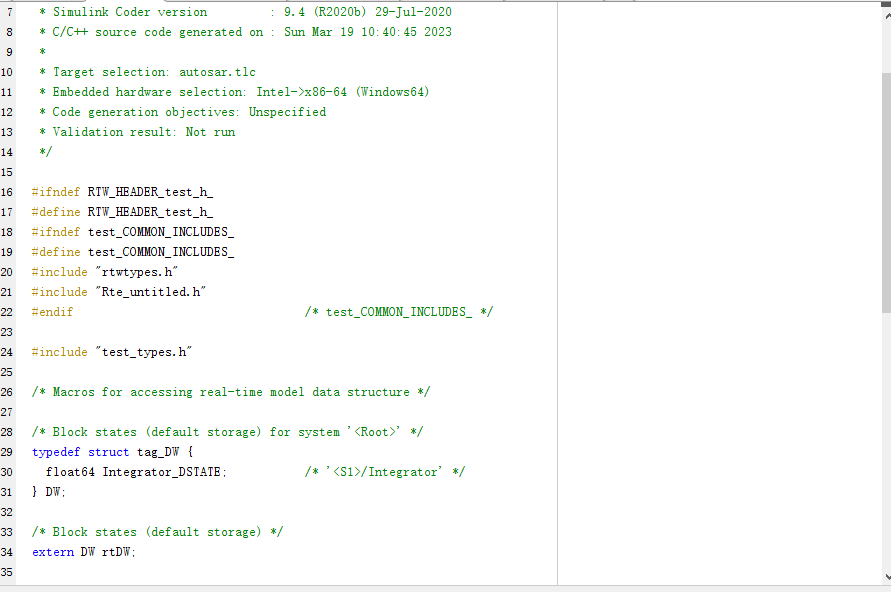
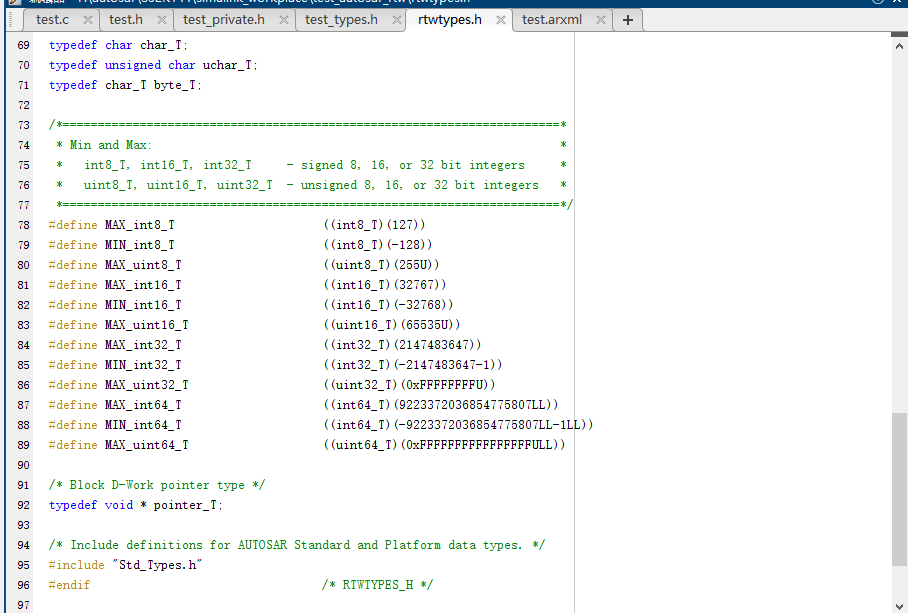
_types.h:包含用typedef定义的模型中所有的参数结构体;
_private.h:包含软件组件私有函数的定义和数据声明
rtwtypes.h:定义Matlab/Simulink的数据类型格式;
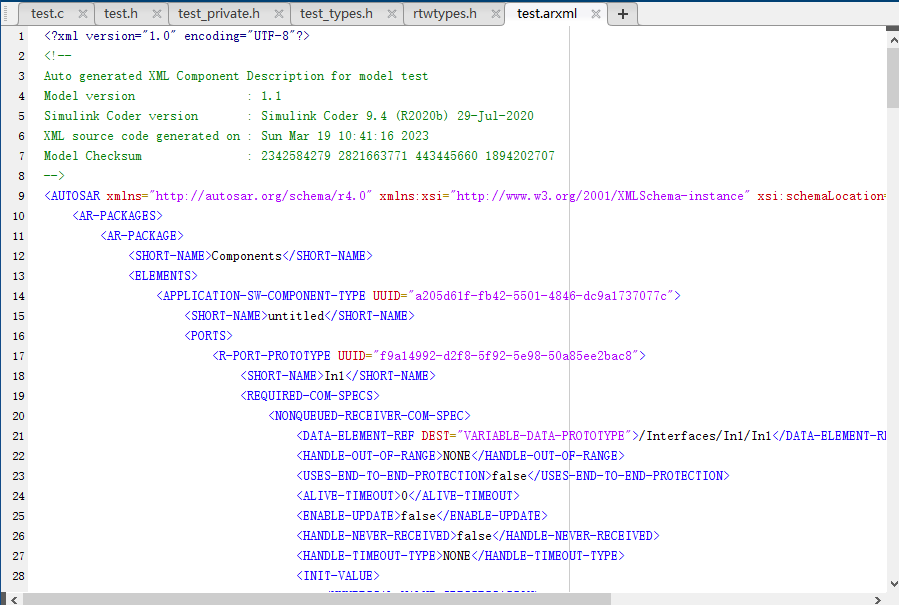
.arxml:这个arxml描述性文件里描述了test软件组件的端口、端口接口、数据类型和内部行为等AUTOSAR软件组件中的元素;
C_external_interface.arxml:这个arxml描述性文件里描述了LightControlSWC 软件组件所包括的C/S接口信息。
参考
《AUTOSAR规范与车用控制器软件开发》
matlab帮助中心:开发符合 AUTOSAR 标准的模型- MATLAB & Simulink Example- MathWorks 中国
上一篇:最新或2023(历届)传达学习十八届五中全会精神手抄报内容 时政手抄报内容2023 19届五中全会精神主题手抄报字体
下一篇:最新或2023(历届)关于五四青年节手抄报资料内容总结 五四青年节手抄报内容文字多一点 五四青年节手抄报有哪些内容