
LearnOpenGL-高级OpenGL-1.深度测试
本人刚学OpenGL不久且自学,文中定有代码、术语等错误,欢迎指正
我写的项目地址:https://github.com/liujianjie/LearnOpenGLProject
文章目录
- 深度测试
- 深度测试函数
- 例子
- 深度值精度
- 深度缓冲的可视化
- 非线性效果
- 将非线性转为线性效果
- 深度冲突
- 介绍
- 防止深度冲突
深度测试
-
有点长的简介
- 深度缓冲就像颜色缓冲(Color Buffer 储存所有的片段颜色:视觉输出)一样,在每个片段中储存了信息,并且(通常)和颜色缓冲有着一样的宽度和高度
- 深度缓冲是由窗口系统自动创建的,它会以16、24或32位float的形式储存它的深度值。在大部分的系统中,深度缓冲的精度都是24位的。
- 当深度测试(Depth Testing)被启用的时候,OpenGL会将一个片段的深度值与深度缓冲的内容进行对比。OpenGL会执行一个深度测试,如果这个测试通过了的话,深度缓冲将会更新为新的深度值。如果深度测试失败了,片段将会被丢弃。
- 深度缓冲是在片段着色器运行之后(以及模板测试(Stencil Testing)运行之后)在屏幕空间中运行的。
- 屏幕空间坐标与通过OpenGL的glViewport所定义的视口密切相关,并且可以直接使用GLSL内建变量gl_FragCoord从片段着色器中直接访问。
- gl_FragCoord的x和y分量代表了片段的屏幕空间坐标(其中(0, 0)位于左下角)。gl_FragCoord中也包含了一个z分量,它包含了片段真正的深度值
-
提前深度测试
-
是硬件属性
-
只要我们清楚当前渲染的片段永远不会是可见的(它在其他物体之后),我们就能提前丢弃这个片段。
-
提前深度测试允许深度测试在片段着色器之前运行。
-
片段着色器通常开销都是很大的,所以我们应该尽可能避免运行它们来渲染像素片段,而提前深度测试可以丢弃片段减少片段着色器运行。
-
-
当使用提前深度测试时
-
片段着色器的一个限制是不能写入片段的深度值。
-
如果一个片段着色器对它的深度值进行了写入,提前深度测试是不可能的。
-
-
程序相关
-
深度测试默认是禁用的,所以如果要启用深度测试的话,我们需要用GL_DEPTH_TEST选项来启用它
glEnable(GL_DEPTH_TEST); -
如果启用了深度缓冲,还应该在每个渲染迭代之前使用GL_DEPTH_BUFFER_BIT来清除深度缓冲,否则会仍在使用上一次渲染迭代中的写入的深度值:
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);清除后,深度缓冲区内的深度值默认都是1
-
需要对所有片段都执行深度测试并丢弃相应的片段,但不希望更新深度缓冲,一个只读的(Read-only)深度缓冲,可以用以下函数
glDepthMask(GL_FALSE);
-
深度测试函数
-
设置测试函数代码
glDepthFunc(GL_LESS); -
参数
函数 描述 GL_ALWAYS 永远通过深度测试 GL_NEVER 永远不通过深度测试 GL_LESS 在片段深度值小于缓冲的深度值时通过测试 GL_EQUAL 在片段深度值等于缓冲区的深度值时通过测试 GL_LEQUAL 在片段深度值小于等于缓冲区的深度值时通过测试 GL_GREATER 在片段深度值大于缓冲区的深度值时通过测试 GL_NOTEQUAL 在片段深度值不等于缓冲区的深度值时通过测试 GL_GEQUAL 在片段深度值大于等于缓冲区的深度值时通过测试 glEnable(GL_DEPTH_TEST); glDepthFunc(GL_ALWAYS);
例子
-
GL_LESS的效果
-
GL_ALWAYS的效果
后绘制的会覆盖先绘制的片段,如下:后绘制的地板会覆盖先绘制的cube


深度值精度
-
引入
- 深度缓冲包含了一个介于0.0和1.0之间的深度值,它将会与观察者视角所看见的场景中所有物体的z值进行比较
- 观察空间的z值可能是投影平截头体的近平面(Near)和远平面(Far)之间的任何值。
- 我们需要一种方式来将这些观察空间的z值变换到[0, 1]范围之间,其中的一种方式就是将它们线性变换到[0, 1]范围之间
-
线性变换
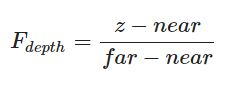
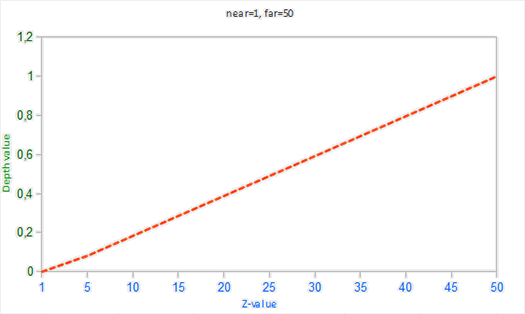
注意所有的方程都会将非常近的物体的深度值设置为接近0.0的值,而当物体非常接近远平面的时候,它的深度值会非常接近1.0。
-
而实际中
我们不需要对1000单位远的深度值和只有1单位远的充满细节的物体使用相同的精度
意思是:
近处物体的深度值要对比明确,正确的分清谁大谁小,应该值的范围设大一点。若值的范围小,当两物体相近的话,深度值相似,对比深度值可能出错,而远处的要求没那么高,可以粗略的对比就行。
-
-
非线性变换

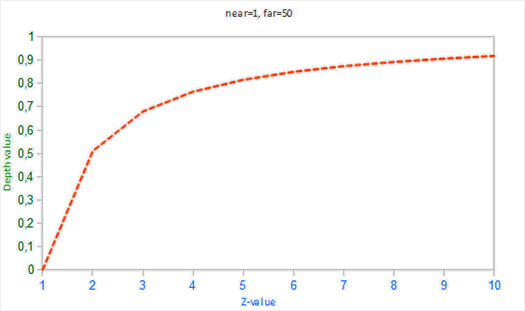
OpenGl默认使用非线性
由于非线性方程与 1/z 成正比,在1.0和2.0之间的z值将会变换至1.0到0.5之间的深度值,这就是一个float提供给我们的一半精度了,这在z值很小的情况下提供了非常大的精度。在50.0和100.0之间的z值将会只占**2%**的float精度
深度缓冲的可视化
非线性效果
-
代码
#version 330 core out vec4 FragColor; void main(){ FragColor = vec4(vec3(gl_FragCoord.z), 1.0); }在片段着色器用gl_FragCoord向量的z值包含了那个特定片段的深度值
-
效果

似乎都是白的,即:深度值接近1
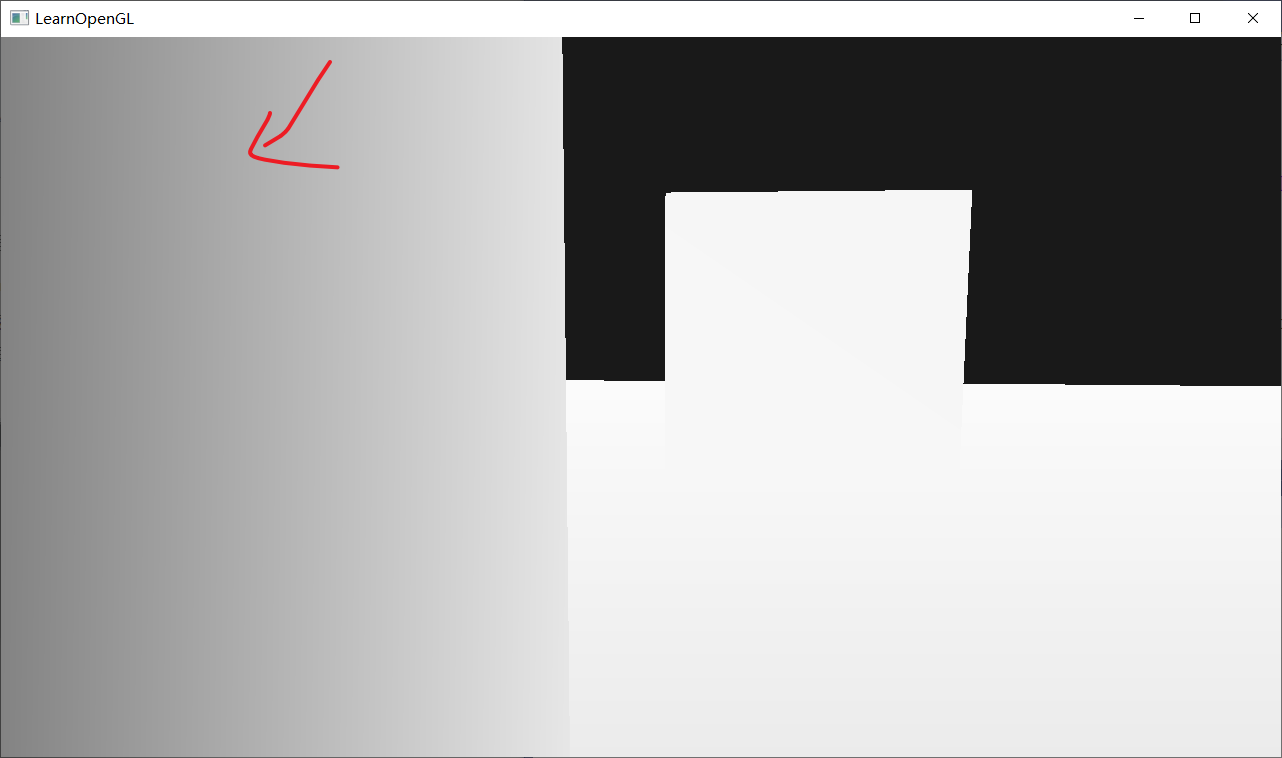
靠近物体才可以看到有黑的,即:深度值接近0
将非线性转为线性效果
-
如何将非线性转为线性
-
将深度值变换为NDC:标准化设备坐标(裁剪空间)
float z = depth * 2.0 - 1.0; -
用获取到的z值,应用逆变换来获取线性的深度值:
float linearDepth = (2.0 * near * far) / (far + near - z * (far - near));
-
-
代码
#version 330 core out vec4 FragColor;float near = 0.1; float far = 100.0;float LinearizeDepth(float depth){float z = depth * 2.0 - 1.0;// 从屏幕空间回到NDC空间return (2.0 * near * far) / (far + near - z * (far - near)); }void main(){ float depth = LinearizeDepth(gl_FragCoord.z) / far;FragColor = vec4(vec3(depth), 1.0); }由于线性化的深度值处于near与far之间,它的大部分值都会大于1.0并显示为完全的白色。通过在main函数中将线性深度值除以far,我们近似地将线性深度值转化到[0, 1]的范围之间
-
效果

颜色大部分都是黑色,因为深度值的范围是0.1的近平面到100的远平面(根据投影矩阵设置),它离我们还是非常远的。结果就是,我们相对靠近近平面,所以会得到更低的(更暗的)深度值。
深度冲突
介绍
-
什么时候出现
在两个平面或者三角形非常紧密地平行排列在一起时会发生,深度缓冲没有足够的精度来决定两个形状哪个在前面
-
造成后果
这两个形状不断地在切换前后顺序,这会导致很奇怪的颜色
-
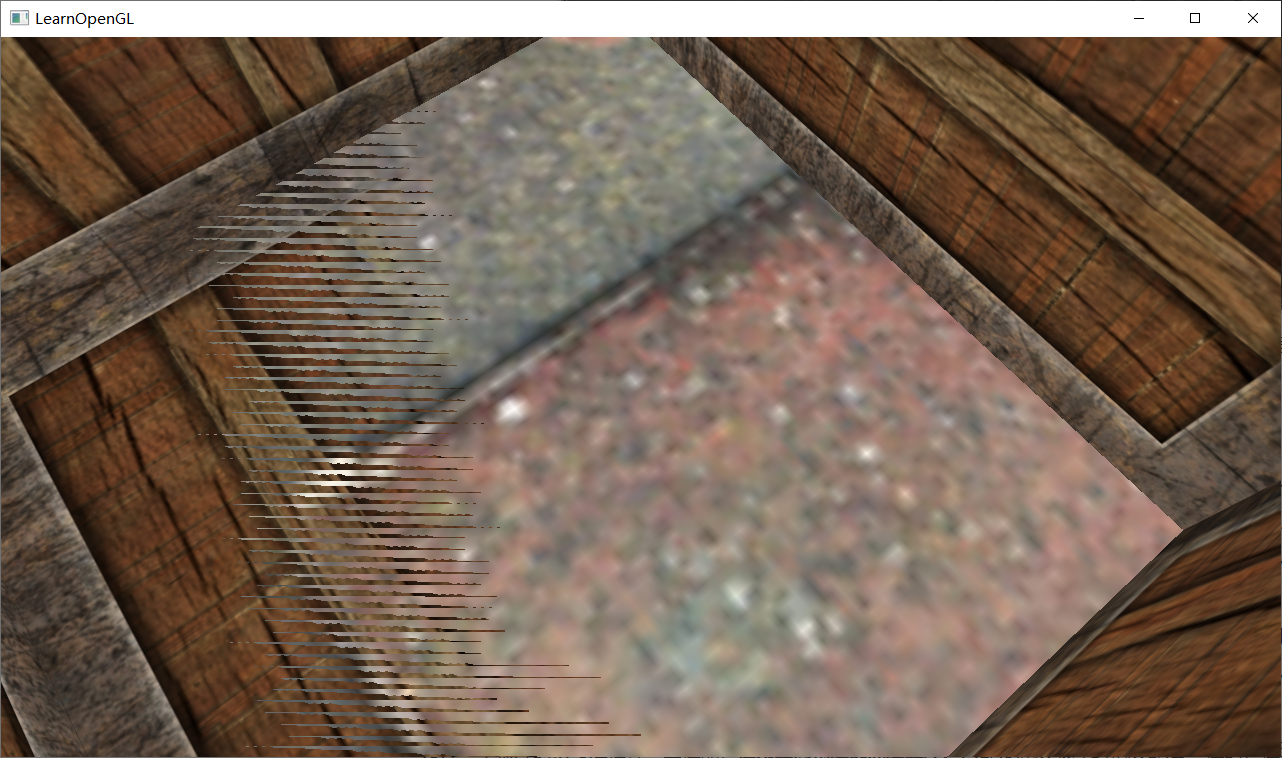
例子
箱子被放置在地板的同一高度上,这也就意味着箱子的底面和地板是共面的(Coplanar)。这两个面的深度值都是一样的,所以深度测试没有办法决定应该显示哪一个。

防止深度冲突
-
永远不要把多个物体摆得太靠近,以至于它们的一些三角形会重叠
-
具体做法
通过在两个物体之间设置一个用户无法注意到的偏移值。
-
例子
在箱子和地板的例子中,我们可以将箱子沿着正y轴稍微移动一点,箱子位置的这点微小改变将不太可能被注意到,但它能够完全减少深度冲突的发生。
-
缺点
然而,这需要对每个物体都手动调整,并且需要进行彻底的测试来保证场景中没有物体会产生深度冲突。
-
-
尽可能将近平面设置远一些
-
具体做法
在前面我们提到了精度在靠近近平面时是非常高的,所以如果我们将近平面远离观察者,我们将会对整个平截头体有着更大的精度(由上讨论的非线性函数图像)。
glm::perspective(glm::radians(camera.Zoom), (float)SCR_WIDTH / (float)SCR_HEIGHT, 0.1f, 100.0f);将0.1f放大
-
缺点
然而,将近平面设置太远将会导致近处的物体被裁剪掉,所以这通常需要实验和微调来决定最适合场景的近平面距离。
-
-
使用更高精度的深度缓冲
-
详细说明
大部分深度缓冲的精度都是24位的,但现在大部分的显卡都支持32位的深度缓冲,这将会极大地提高精度。
-
代价
牺牲了一些性能,获得更高精度的深度测试,减少深度冲突。
-
这三个技术是最普遍也是很容易实现的抗深度冲突技术了。还有一些更复杂的技术,但它们依然不能完全消除深度冲突。
深度冲突是一个常见的问题,但如果组合使用了上面列举出来的技术,可能不会再需要处理深度冲突了。
下一篇:zegformer