
cartgrapher ukf 代码清晰属实不错
文章目录
- 原理
- UKF
- Sigma and weight
- UKF Algorithm
- UT/UKF/EKF Summary
- cato_code
- 外围函数
- 检测是否为对称矩阵
- 矩阵的开方根
- 高斯分布
- UKF 代码实现
- 类
- 预测
- 观测更新
- 点评
原理
UKF
- KF 系列求解:
Kalman filter需要线性模型EKF通过泰勒展开线性化- 更好的方式线性化 ->
Unscented Transform->UKF- 计算一组(所谓的)sigma 点
- 从变换和加权的 sigma 点计算高斯
Unscented Transform- 计算一系列的 Sigma 点
- 每个Sigma点有一个权重
- 通过非线性函数转换 Sigma 点
- 权重点计算高斯
Sigma and weight
Sigma 点- 选择 χ[i]{\chi^{[i]}}χ[i],w[i]{w^{[i]}}w[i] 使得:
- ∑iw[i]=1{\sum_i w^{[i]} = 1}∑iw[i]=1
- μ=∑iw[i]χ[i]{ \mu = \sum_i w^{[i]}\chi^{[i]}}μ=∑iw[i]χ[i]
- ∑=∑iw[i](χ[i]−μ)(χ[i]−μ)T{\sum = \sum_i w^{[i]}(\chi^{[i]}-\mu)(\chi^{[i]}-\mu)^T}∑=∑iw[i](χ[i]−μ)(χ[i]−μ)T
- 没有唯一的解决方案
- 如何选择Sigma点
- 第一个Sigma点也是均值 χ[0]=μ{\chi^[0] = \mu}χ[0]=μ
- χ[i]=μ+((n+λ)∑)i{\chi^[i] = \mu + (\sqrt{(n+\lambda)\sum})_i}χ[i]=μ+((n+λ)∑)i for i=1,…,n
- χ[i]=μ−((n+λ)∑)i−n{\chi^[i] = \mu - (\sqrt{(n+\lambda)\sum})_{i-n}}χ[i]=μ−((n+λ)∑)i−n for i=1+n,…,2n
- 矩阵的开方根
- nnn 维度
- λ\lambdaλ 缩放参数
- 矩阵开方根
- 定义 SSS,∑=SS\sum=SS∑=SS
- 通过对角化计算:
- ∑=VDV−1=(d11⋯0⋮⋱⋮0⋯dnn)=V(d11⋯0⋮⋱⋮0⋯dnn)(d11⋯0⋮⋱⋮0⋯dnn)V−1{\sum=VDV^{-1}= \begin{pmatrix} d_{11} & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & d_{nn} \end{pmatrix} = V\begin{pmatrix} \sqrt{d_{11}} & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & \sqrt{d_{nn}} \end{pmatrix} \begin{pmatrix} \sqrt{d_{11}} & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & \sqrt{d_{nn}} \end{pmatrix} V^{-1}}∑=VDV−1=⎝⎜⎛d11⋮0⋯⋱⋯0⋮dnn⎠⎟⎞=V⎝⎜⎛d11⋮0⋯⋱⋯0⋮dnn⎠⎟⎞⎝⎜⎛d11⋮0⋯⋱⋯0⋮dnn⎠⎟⎞V−1
- 因此可以定义: S=VD1/2V−1{S=VD^{1/2}V^{-1}}S=VD1/2V−1
- 因此:SS=(VD1/2V−1)(VD1/2V−1)=VDV−1=ΣSS=(VD^{1/2}V^{-1})(VD^{1/2}V^{-1})=VDV^{-1}=\SigmaSS=(VD1/2V−1)(VD1/2V−1)=VDV−1=Σ
Cholesky Matrix开方根法- 矩阵开方根的替代定义:L,∑=LLT{L, \sum=LL^T}L,∑=LLT
- L,∑{L,\sum}L,∑ 有相同的特征向量
- Sigma 点和特征向量
- Sigma 点可以但不必位于 Σ{\Sigma}Σ 的主轴上
- χ[i]=μ+((n+λ)∑)i{\chi^[i] = \mu + (\sqrt{(n+\lambda)\sum})_i}χ[i]=μ+((n+λ)∑)i for i=1,…,n
- χ[i]=μ−((n+λ)∑)i−n{\chi^[i] = \mu - (\sqrt{(n+\lambda)\sum})_{i-n}}χ[i]=μ−((n+λ)∑)i−n for i=1+n,…,2n
- Sigma 点可以但不必位于 Σ{\Sigma}Σ 的主轴上
- Sigma 点 权重
- wm[0]=λn+λ{w_m^{[0]}=\frac{\lambda}{n+\lambda}}wm[0]=n+λλ
- wc[0]=wm[0]+(1−α2+β){w_c^{[0]}=w_m^{[0]}+(1-\alpha^2+\beta)}wc[0]=wm[0]+(1−α2+β)
- wc[i]=wm[i]=12(n+λ){w_c^{[i]}=w_m^{[i]} = \frac{1}{2(n+\lambda)}}wc[i]=wm[i]=2(n+λ)1 for i=1,…,2n
- 其中:
- wm[i]{w_m^{[i]}}wm[i] 用于计算均值,
- wc[i]{w_c^{[i]}}wc[i] 用于计算协方差
- 右边的为参数
- 选择 χ[i]{\chi^{[i]}}χ[i],w[i]{w^{[i]}}w[i] 使得:
- 恢复高斯
- 从权重和 点计算高斯
- μ′=∑i=02nwm[i]g(χ[i]){\mu'=\sum_{i=0}^{2n}w_m^{[i]}\ g({\chi}^{[i]})}μ′=∑i=02nwm[i] g(χ[i])
- Σ′=∑i=02nwc[i](g(χ[i])−μ′)(g(χ[i])−μ′)T{\Sigma'=\sum_{i=0}^{2n} w_c^{[i]}(g(\chi^{[i]})-\mu')(g(\chi^{[i]})-\mu')^T}Σ′=∑i=02nwc[i](g(χ[i])−μ′)(g(χ[i])−μ′)T
UKF Algorithm
-
Sigma points and Weight
- 点:
- χ[0]=μ\chi^{[0]}=\muχ[0]=μ
- χ[i]=μ+((n+λ)∑)i{\chi^[i] = \mu + (\sqrt{(n+\lambda)\sum})_i}χ[i]=μ+((n+λ)∑)i for i=1,…,n
- χ[i]=μ−((n+λ)∑)i−n{\chi^[i] = \mu - (\sqrt{(n+\lambda)\sum})_{i-n}}χ[i]=μ−((n+λ)∑)i−n for i=1+n,…,2n
- 权重:
- wm[0]=λn+λ{w_m^{[0]}=\frac{\lambda}{n+\lambda}}wm[0]=n+λλ
- wc[0]=wm[0]+(1−α2+β){w_c^{[0]}=w_m^{[0]}+(1-\alpha^2+\beta)}wc[0]=wm[0]+(1−α2+β)
- wc[i]=wm[i]=12(n+λ){w_c^{[i]}=w_m^{[i]} = \frac{1}{2(n+\lambda)}}wc[i]=wm[i]=2(n+λ)1 for i=1,…,2n
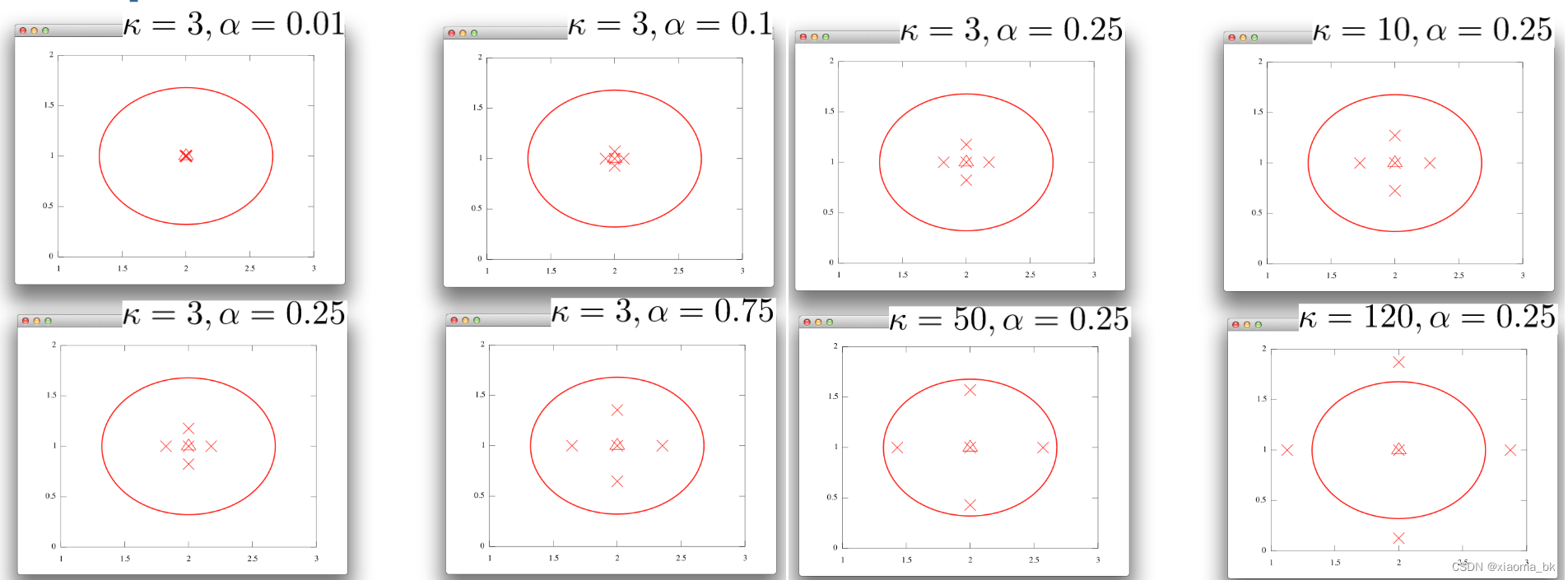
- 参数:
- k≥0k \geq 0k≥0
- α∈(0,1]\alpha \in (0,1]α∈(0,1] 影响
Sigma点与均值的距离 - λ=α(n+k)−n\lambda =\alpha(n+k)-nλ=α(n+k)−n
- β=2\beta=2β=2 优化选择为高斯
- 点:
-
Prediction
-
χt−1=(μt−1,μt−1+(n+λ)∑t−1μt−1−(n+λ)∑t−1){\chi_{t-1}=(\mu_{t-1},\ \ \mu_{t-1}+\sqrt{(n+\lambda)\sum_{t-1}}\ \ \mu_{t-1}-\sqrt{(n+\lambda)\sum_{t-1}})}χt−1=(μt−1, μt−1+(n+λ)∑t−1 μt−1−(n+λ)∑t−1)
-
χˉt∗=g(ut,χt−1){\bar{\chi}_t^* = g(u_t,\chi_{t-1})}χˉt∗=g(ut,χt−1)
-
μtˉ=∑i=02nwm[i]χˉt∗[i]{\bar{\mu_t}=\sum_{i=0}^{2n}w_m^{[i]}\bar{\chi}_t^{*[i]}}μtˉ=∑i=02nwm[i]χˉt∗[i]
-
Σˉt=∑i=02nwc[i](χˉt∗[i]−μtˉ)(χˉt∗[i]−μtˉ)T+Rt{\bar{\Sigma}_t=\sum_{i=0}^{2n}w_c^{[i]}(\bar{\chi}_t^{*[i]}-\bar{\mu_t})(\bar{\chi}_t^{*[i]}-\bar{\mu_t})^T+R_t}Σˉt=∑i=02nwc[i](χˉt∗[i]−μtˉ)(χˉt∗[i]−μtˉ)T+Rt
-
-
Correction
- χtˉ=(μtˉ,μtˉ+(n+λ)∑t−1,μtˉ−(n+λ)∑t−1){\bar{\chi_{t} }=(\bar{\mu_{t}},\ \ \bar{\mu_{t}}+\sqrt{(n+\lambda)\sum_{t-1}},\ \ \bar{\mu_{t}}-\sqrt{(n+\lambda)\sum_{t-1}})}χtˉ=(μtˉ, μtˉ+(n+λ)∑t−1, μtˉ−(n+λ)∑t−1)
- ztˉ=h(χtˉ){\bar{z_t}=h(\bar{\chi_t})}ztˉ=h(χtˉ)
- zt^=∑i=02nwm[i]zˉt[i]{\hat{z_t}=\sum_{i=0}^{2n}w_m^{[i]}\bar{z}_t^{[i]}}zt^=∑i=02nwm[i]zˉt[i]
- St=∑i=02nwc[i](χˉt[i]−μˉt)(χˉt[i]−μˉt)T{S_t=\sum_{i=0}^{2n}w_c^{[i]}(\bar{\chi}_t^{[i]}-\bar{\mu}_t)(\bar{\chi}_t^{[i]}-\bar{\mu}_t)^T}St=∑i=02nwc[i](χˉt[i]−μˉt)(χˉt[i]−μˉt)T
- Kt=∑ˉtx,zSt−1{K_t = \bar{\sum}_t^{x,z}S_t^{-1}}Kt=∑ˉtx,zSt−1
- ∑t=∑ˉt−KtStKtT{\sum_t =\bar{\sum}_t - K_tS_tK_t^T}∑t=∑ˉt−KtStKtT
UT/UKF/EKF Summary
- UT/UKF
- 无迹卡尔曼作为线性化的替代方案
- UT 是比泰勒展开更好的近似值
- UT 使用 sigma 点传播
- UT中的自由参数
- UKF 在预测和校正步骤中使用 UT
- UKF VS EKF
- 线性模型的结果与 EKF 相同
- 非线性模型比 EKF 更好的近似
- 差异通常“有点小”
- UKF 不需要雅可比行列式
- 相同的复杂度类
- 比 EKF 稍慢
- 仍然受限于高斯分布
cato_code
外围函数
检测是否为对称矩阵
检查A是否是对称矩阵,A减去A的转置~=0
- ∣∣(A−AT)∣∣2<1e−5{||(A-A^T)||_2 < 1e-5}∣∣(A−AT)∣∣2<1e−5
// Checks if 'A' is a symmetric matrix.
template
void CheckSymmetric(const Eigen::Matrix& A) {// This should be pretty much Eigen::Matrix<>::Zero() if the matrix is// symmetric.//The NaN values are used to identify undefined or non-representable values for floating-point elements, //such as the square root of negative numbers or the result of 0/0.const FloatType norm = (A - A.transpose()).norm();CHECK(!std::isnan(norm) && std::abs(norm) < 1e-5)<< "Symmetry check failed with norm: '" << norm << "' from matrix:\n"<< A;
}
矩阵的开方根
本代码使用的为上述中 对角化的方法:
- 定义 SSS,∑=SS\sum=SS∑=SS
- 通过对角化计算:
- ∑=VDV−1=(d11⋯0⋮⋱⋮0⋯dnn)=V(d11⋯0⋮⋱⋮0⋯dnn)(d11⋯0⋮⋱⋮0⋯dnn)V−1{\sum=VDV^{-1}= \begin{pmatrix} d_{11} & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & d_{nn} \end{pmatrix} = V\begin{pmatrix} \sqrt{d_{11}} & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & \sqrt{d_{nn}} \end{pmatrix} \begin{pmatrix} \sqrt{d_{11}} & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & \sqrt{d_{nn}} \end{pmatrix} V^{-1}}∑=VDV−1=⎝⎜⎛d11⋮0⋯⋱⋯0⋮dnn⎠⎟⎞=V⎝⎜⎛d11⋮0⋯⋱⋯0⋮dnn⎠⎟⎞⎝⎜⎛d11⋮0⋯⋱⋯0⋮dnn⎠⎟⎞V−1
- 因此可以定义: S=VD1/2V−1{S=VD^{1/2}V^{-1}}S=VD1/2V−1
代码实现:
-
几个术语: Av=λv. λ 为一标量,称为 v 对应的特征值。也称 v 为特征值 λ 对应的特征向量。 eigendecomposition,特征分解,谱分解,是将矩阵分解为由其特征值和特征向量表示的矩阵之积的方法。 需要注意只有对可对角化矩阵才可以施以特征分解。eigenvalues 特征值, eigenvectors 特征向量 返回对称半正定矩阵的平方根B,M=B*B -
templateEigen::Matrix
高斯分布
高斯分布
-
均值 : N×1N\times 1N×1
-
协方差: N×NN\times NN×N
-
/* 高斯分布类 构造函数是N*1的均值矩阵和N*N的协方差矩阵*/ templateclass GaussianDistribution {public:GaussianDistribution(const Eigen::Matrix
高斯 相加
-
均值:均值+均值
-
协方差:协方差+协方差
-
/*高斯分布性质: https://zh.wikipedia.org/wiki/%E6%AD%A3%E6%80%81%E5%88%86%E5%B8%83 */ templateGaussianDistribution
高斯 相乘
-
均值: (N×M)⋅(M×1)=(N×1)(N\times M) \cdot (M \times 1) = (N \times 1)(N×M)⋅(M×1)=(N×1)
-
协方差:(N×M)⋅(M×M)⋅(M×N)=(N×N)(N\times M) \cdot (M \times M) \cdot (M \times N) = (N \times N)(N×M)⋅(M×M)⋅(M×N)=(N×N)
-
templateGaussianDistribution
UKF 代码实现
卡尔曼滤波器的操作包括两个阶段:
- 预测与更新。在预测阶段,滤波器使用上一状态的估计,做出对当前状态的估计。
- 在更新阶段,滤波器利用对当前状态的观测值优化在预测阶段获得的预测值,以获得一个更精确的新估计值。
类
template
class UnscentedKalmanFilter {
public:using StateType = Eigen::Matrix; //状态矩阵N*1using StateCovarianceType = Eigen::Matrix; //协方差矩阵N*Nexplicit UnscentedKalmanFilter(const GaussianDistribution& initial_belief, //参数1std::function //参数2add_delta = [](const StateType& state,const StateType& delta) { return state + delta; },std::function //参数3compute_delta =[](const StateType& origin, const StateType& target) {return target - origin;}): belief_(initial_belief),add_delta_(add_delta),compute_delta_(compute_delta) {}/*** @brief Predict 预测step。使用卡尔曼滤波对当前状态进行预测。* @param g 控制必须由函数 g 隐式添加,该函数也进行状态转换。* @param epsilon “epsilon”是控制噪声和模型噪声的加法组合。*/void Predict(std::function g,const GaussianDistribution& epsilon);/*** @brief Observe 观测步骤* @param h 'h' 将状态转换为应该为零的观察值,传感器读数应该已经包含在这个函数中。* @param delta 'delta' 是测量噪声,必须具有零均值。*/template void Observe(std::function(const StateType&)> h,const GaussianDistribution& delta)private://计算带权重的偏差,权重事先算好了StateType ComputeWeightedError(const StateType& mean_estimate,const std::vector& states) {StateType weighted_error =kMeanWeight0 * compute_delta_(mean_estimate, states[0]);for (int i = 1; i != 2 * N + 1; ++i) {weighted_error += kMeanWeightI * compute_delta_(mean_estimate, states[i]);}return weighted_error;}//计算均值。基于权重误差评判计算StateType ComputeMean(const std::vector& states) {CHECK_EQ(states.size(), 2 * N + 1);StateType current_estimate = states[0];StateType weighted_error = ComputeWeightedError(current_estimate, states);int iterations = 0;while (weighted_error.norm() > 1e-9) {double step_size = 1.;while (true) {const StateType next_estimate =add_delta_(current_estimate, step_size * weighted_error);const StateType next_error =ComputeWeightedError(next_estimate, states);if (next_error.norm() < weighted_error.norm()) {current_estimate = next_estimate;weighted_error = next_error;break;}step_size *= 0.5;CHECK_GT(step_size, 1e-3) << "Step size too small, line search failed.";}++iterations;CHECK_LT(iterations, 20) << "Too many iterations.";}return current_estimate;}// 常值确定参数 sqr=a*a, OuterProduct=V*V^T N*1 || 1*N -> 外积,N*Nconstexpr static FloatType kAlpha = 1e-3;constexpr static FloatType kKappa = 0.;constexpr static FloatType kBeta = 2.;constexpr static FloatType kLambda = sqr(kAlpha) * (N + kKappa) - N;constexpr static FloatType kMeanWeight0 = kLambda / (N + kLambda);constexpr static FloatType kCovWeight0 =kLambda / (N + kLambda) + (1. - sqr(kAlpha) + kBeta);constexpr static FloatType kMeanWeightI = 1. / (2. * (N + kLambda));constexpr static FloatType kCovWeightI = kMeanWeightI;// 成员变量//1),N*1矩阵,对N个变量的估计GaussianDistribution belief_; //2),add_delta_,加法操作const std::functionadd_delta_;//3),compute_delta_,计算偏差操作const std::functioncompute_delta_;
};//外部声明。感觉这儿没啥用
template
constexpr FloatType UnscentedKalmanFilter::kAlpha;
template
constexpr FloatType UnscentedKalmanFilter::kKappa;
template
constexpr FloatType UnscentedKalmanFilter::kBeta;
template
constexpr FloatType UnscentedKalmanFilter::kLambda;
template
constexpr FloatType UnscentedKalmanFilter::kMeanWeight0;
template
constexpr FloatType UnscentedKalmanFilter::kCovWeight0;
template
constexpr FloatType UnscentedKalmanFilter::kMeanWeightI;
template
constexpr FloatType UnscentedKalmanFilter::kCovWeightI;
预测
步骤:
-
1、判断协方差 为对称矩阵 2、取当前状态的均值和 协方差开方根 (生成Sigma点要用) 3、计算状态转移矩阵,均值+协方差均值直接权重相加,然后基于误差在一定范围得到`最优均值`协方差 直接基于 `最优均值` 重新计算 4、更新状态 均值+协方差
代码:
void Predict(std::function g,const GaussianDistribution& epsilon) {/// 1. 协方差是对称矩阵CheckSymmetric(epsilon.GetCovariance());// Get the state mean and matrix root of its covariance./// 2. 取当前状态的均值+协方差开方根const StateType& mu = belief_.GetMean();const StateCovarianceType sqrt_sigma = MatrixSqrt(belief_.GetCovariance());//N*N// 由于UKF,采用点2N+1std::vector Y;//需要计算的状态矩阵,N*1矩阵。Y.reserve(2 * N + 1);//公式:p65/// 3. 计算状态转移矩阵,均值+协方差Y.emplace_back(g(mu));//状态转移方程,公式p65:3.68,p70:3const FloatType kSqrtNPlusLambda = std::sqrt(N + kLambda);for (int i = 0; i < N; ++i) {// Order does not matter here as all have the same weights in the// summation later on anyways.Y.emplace_back(g(add_delta_(mu, kSqrtNPlusLambda * sqrt_sigma.col(i))));Y.emplace_back(g(add_delta_(mu, -kSqrtNPlusLambda * sqrt_sigma.col(i))));}// 得到最优 均值 (误差小于阈值)const StateType new_mu = ComputeMean(Y);// 基于最新阈值重新计算新的协方差StateCovarianceType new_sigma =kCovWeight0 * OuterProduct(compute_delta_(new_mu, Y[0]));for (int i = 0; i < N; ++i) {new_sigma += kCovWeightI * OuterProduct(compute_delta_(new_mu, Y[2 * i + 1]));new_sigma += kCovWeightI * OuterProduct(compute_delta_(new_mu, Y[2 * i + 2]));}CheckSymmetric(new_sigma);//更新状态 均值+协方差belief_ = GaussianDistribution(new_mu, new_sigma) + epsilon;
}
观测更新
步骤:
1、判断 观测均值和协方差,均值0附近,协方差对称矩阵
2、取当前状态的均值和 协方差开方根 (生成Sigma点要用)
3、计算0均值sigma点和Z,得出 总体观测均值 ,协方差均值经转移方程后直接权重相加,得到`最新均值`协方差 直接基于 `最新均值` 重新计算,同时加上观测自身的协方差
4、计算 (x,z)的sigma。x 即sigma,z (z_t -z_u)
5、得到 K_t
6、更新 协方差 。原协方差-ksk^T
7、更新状态 均值+协方差
代码实现:
/*** @brief Observe 观测步骤* @param h 'h' 将状态转换为应该为零的观察值,传感器读数应该已经包含在这个函数中。* @param delta 'delta' 是测量噪声,必须具有零均值。*/
void Observe(std::function(const StateType&)> h,const GaussianDistribution& delta) {/// 1. 观测均值0附近,观测协方差是对称矩阵CheckSymmetric(delta.GetCovariance());// We expect zero mean delta.CHECK_NEAR(delta.GetMean().norm(), 0., 1e-9);/// 2. 取当前状态的均值+协方差开方根// Get the state mean and matrix root of its covariance.const StateType& mu = belief_.GetMean();const StateCovarianceType sqrt_sigma = MatrixSqrt(belief_.GetCovariance());// As in Kraft's paper, we compute W containing the zero-mean sigma points,// since this is all we need.// 计算0均值的sigma点,及转移后的sigma值std::vector W;W.reserve(2 * N + 1);W.emplace_back(StateType::Zero());std::vector> Z;Z.reserve(2 * N + 1);Z.emplace_back(h(mu));/// 3. 计算0均值sigma点和Z,得出 总体观测均值Eigen::Matrix z_hat = kMeanWeight0 * Z[0];const FloatType kSqrtNPlusLambda = std::sqrt(N + kLambda);for (int i = 0; i < N; ++i) {// Order does not matter here as all have the same weights in the// summation later on anyways.W.emplace_back(kSqrtNPlusLambda * sqrt_sigma.col(i));Z.emplace_back(h(add_delta_(mu, W.back())));W.emplace_back(-kSqrtNPlusLambda * sqrt_sigma.col(i));Z.emplace_back(h(add_delta_(mu, W.back())));z_hat += kMeanWeightI * Z[2 * i + 1];z_hat += kMeanWeightI * Z[2 * i + 2];}/// 4. 得出总体观测的 协方差(递推协方差+自身协方差)Eigen::Matrix S =kCovWeight0 * OuterProduct(Z[0] - z_hat);for (int i = 0; i < N; ++i) {S += kCovWeightI * OuterProduct(Z[2 * i + 1] - z_hat);S += kCovWeightI * OuterProduct(Z[2 * i + 2] - z_hat);}CheckSymmetric(S); // 递推协方差 对称矩阵S += delta.GetCovariance();/// 5. 计算Sigma_x,zEigen::Matrix sigma_bar_xz =kCovWeight0 * W[0] * (Z[0] - z_hat).transpose();for (int i = 0; i < N; ++i) {sigma_bar_xz +=kCovWeightI * W[2 * i + 1] * (Z[2 * i + 1] - z_hat).transpose();sigma_bar_xz +=kCovWeightI * W[2 * i + 2] * (Z[2 * i + 2] - z_hat).transpose();}/// 6. 计算 K_t,更新协方差const Eigen::Matrix kalman_gain =sigma_bar_xz * S.inverse();const StateCovarianceType new_sigma =belief_.GetCovariance() - kalman_gain * S * kalman_gain.transpose();CheckSymmetric(new_sigma);/// 7. 更新 状态方程belief_ = GaussianDistribution(add_delta_(mu, kalman_gain * -z_hat), new_sigma);
}
点评
- 预测、更新的状态方程都可以动态给出
- 代码结构清晰,属实不错
上一篇:伤感爱情女生QQ个性签名大全最新或2023(历届)最新版的 qq个性签名爱情伤感经典语录 2018年女生爱情伤感qq签名
下一篇:伤感爱情女生QQ个性签名大全最新或2023(历届)最新版的 伤感个性签名关于爱情女生 女生的qq个性签名大全伤感